 View larger
View larger


Moveit gazebo top
Moveit gazebo top, ROS Q A 003 How to control a Gazebo simulated robot with MoveIt UR5 Tutorial top
$94.00
SAVE 50% OFF
$47.00
$0 today, followed by 3 monthly payments of $15.67, interest free. Read More
Moveit gazebo top
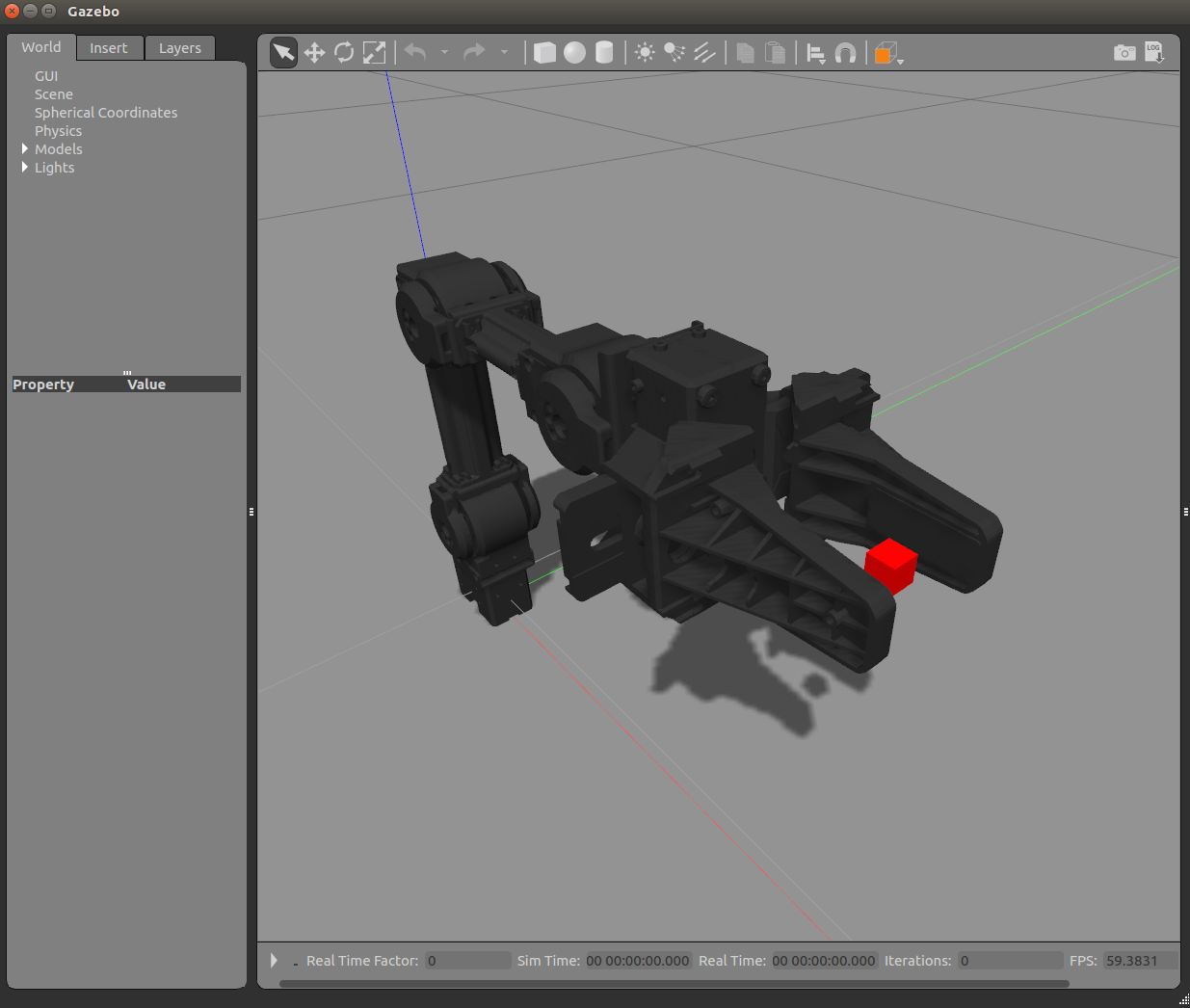
ROS Q A 003 How to control a Gazebo simulated robot with MoveIt UR5 Tutorial
universal robot UR3 gazebo
Franka Emika Panda in Gazebo with ROS and Docker Sebastian
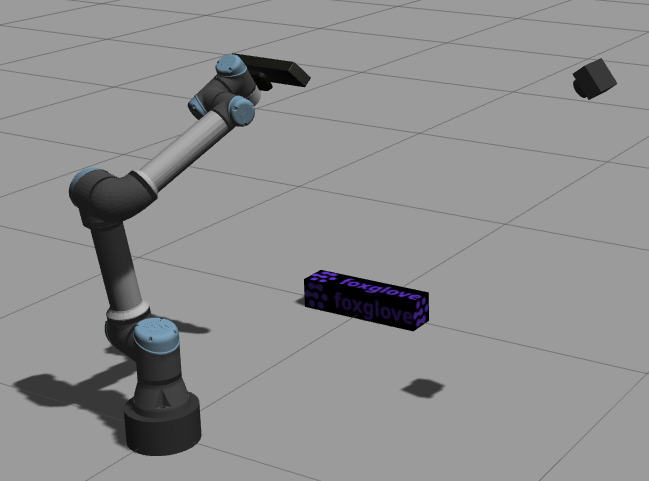
Simulating Robotic Scenarios with ROS 1 and Gazebo Foxglove
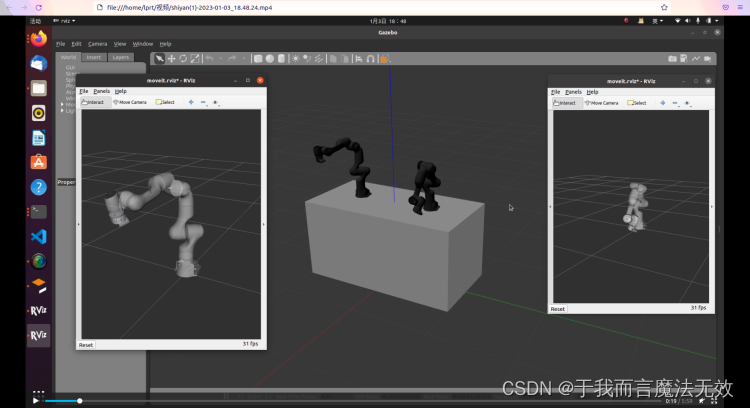
Moveit Gazebo CSDN
OpenMANIPULATOR X
Description
Product code: Moveit gazebo top
How to interface the MoveIt Configuration Package to Gazebo top, ridgeback dual arm gazebo moveit Issue 1 ridgeback top, How to connect the MoveIt planning with Gazebo simulation top, What are the differences between ROS moveit and Gazebo Quora top, Custom Manipulator Simulation in Gazebo and Motion Planning with top, Some problem with Connection between Gazebo and moveit ROS top, OpenMANIPULATOR P top, Gazebo Configuration Guide MoveIt Pro Documentation stable top, The robotic arm in Gazebo bottom and rviz with MoveIt package top, Gazebo Configuration Guide MoveIt Pro Documentation stable top, Unnamed Mobile Robot ROS MoveIt Gazebo top, Problems with RViz and Gazebo MoveIt pick and place tutorial top, moveit2 Gazebo simulation not working Robot state joint states top, simulate robotic arm in ros gazebo moveit and unity top, Open Manipulator X. ROS. MoveIt Gazebo Simulation top, ROS Tutorial Pick and Place task with the Moveit C interface top, The KUKA KR5 robotic arm in a rviz with MoveIt package and b top, Ignition Gazebo ROS 2 August community meeting cross post top, How to connect my Motion planning to my gazebo model Gazebo Q A top, How to create a gazebo simulation for your Robotic Arm The Construct top, ROS Q A 003 How to control a Gazebo simulated robot with MoveIt UR5 Tutorial top, universal robot UR3 gazebo top, Franka Emika Panda in Gazebo with ROS and Docker Sebastian top, Simulating Robotic Scenarios with ROS 1 and Gazebo Foxglove top, Moveit Gazebo CSDN top, OpenMANIPULATOR X top, Can I simulate franka panda in Gazebo Issue 44 frankaemika top, Using Navigation Stack together with Moveit ROS Answers Open top, Figure 3 from Mobile manipulation task simulation using ROS with top, PR2 Kinetic MoveIt General Support The Construct ROS Community top, MoveIt Constraint aware planning Erdal Pekel top, Running gazebo and moveit in docker container with ubuntu 22.04 top, melodic UR5 Moveit model not showing correctly Issue 374 ros top, OpenMANIPULATOR X top, Error while lauching moveit package in Gazebo simulations ROS top.
How to interface the MoveIt Configuration Package to Gazebo top, ridgeback dual arm gazebo moveit Issue 1 ridgeback top, How to connect the MoveIt planning with Gazebo simulation top, What are the differences between ROS moveit and Gazebo Quora top, Custom Manipulator Simulation in Gazebo and Motion Planning with top, Some problem with Connection between Gazebo and moveit ROS top, OpenMANIPULATOR P top, Gazebo Configuration Guide MoveIt Pro Documentation stable top, The robotic arm in Gazebo bottom and rviz with MoveIt package top, Gazebo Configuration Guide MoveIt Pro Documentation stable top, Unnamed Mobile Robot ROS MoveIt Gazebo top, Problems with RViz and Gazebo MoveIt pick and place tutorial top, moveit2 Gazebo simulation not working Robot state joint states top, simulate robotic arm in ros gazebo moveit and unity top, Open Manipulator X. ROS. MoveIt Gazebo Simulation top, ROS Tutorial Pick and Place task with the Moveit C interface top, The KUKA KR5 robotic arm in a rviz with MoveIt package and b top, Ignition Gazebo ROS 2 August community meeting cross post top, How to connect my Motion planning to my gazebo model Gazebo Q A top, How to create a gazebo simulation for your Robotic Arm The Construct top, ROS Q A 003 How to control a Gazebo simulated robot with MoveIt UR5 Tutorial top, universal robot UR3 gazebo top, Franka Emika Panda in Gazebo with ROS and Docker Sebastian top, Simulating Robotic Scenarios with ROS 1 and Gazebo Foxglove top, Moveit Gazebo CSDN top, OpenMANIPULATOR X top, Can I simulate franka panda in Gazebo Issue 44 frankaemika top, Using Navigation Stack together with Moveit ROS Answers Open top, Figure 3 from Mobile manipulation task simulation using ROS with top, PR2 Kinetic MoveIt General Support The Construct ROS Community top, MoveIt Constraint aware planning Erdal Pekel top, Running gazebo and moveit in docker container with ubuntu 22.04 top, melodic UR5 Moveit model not showing correctly Issue 374 ros top, OpenMANIPULATOR X top, Error while lauching moveit package in Gazebo simulations ROS top.