 View larger
View larger
Gazebo linux top
Gazebo linux top, Write Launch and URDF XACRO Models Files and Load them in Gazebo top
$100.00
SAVE 50% OFF
$50.00
$0 today, followed by 3 monthly payments of $16.67, interest free. Read More
Gazebo linux top
Write Launch and URDF XACRO Models Files and Load them in Gazebo
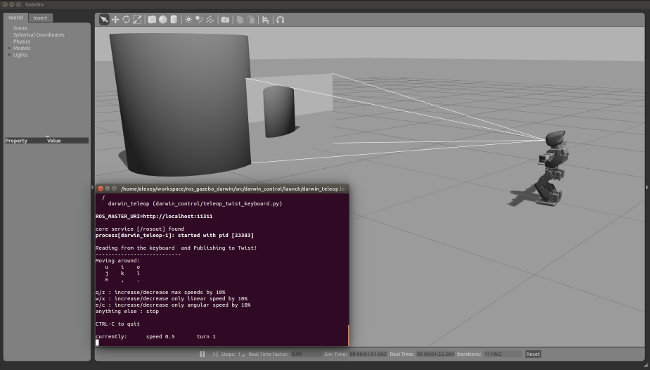
Simulating uav using gazebo and ros ArduCopter ArduPilot Discourse
ROS Gazebo MATLAB MLRO
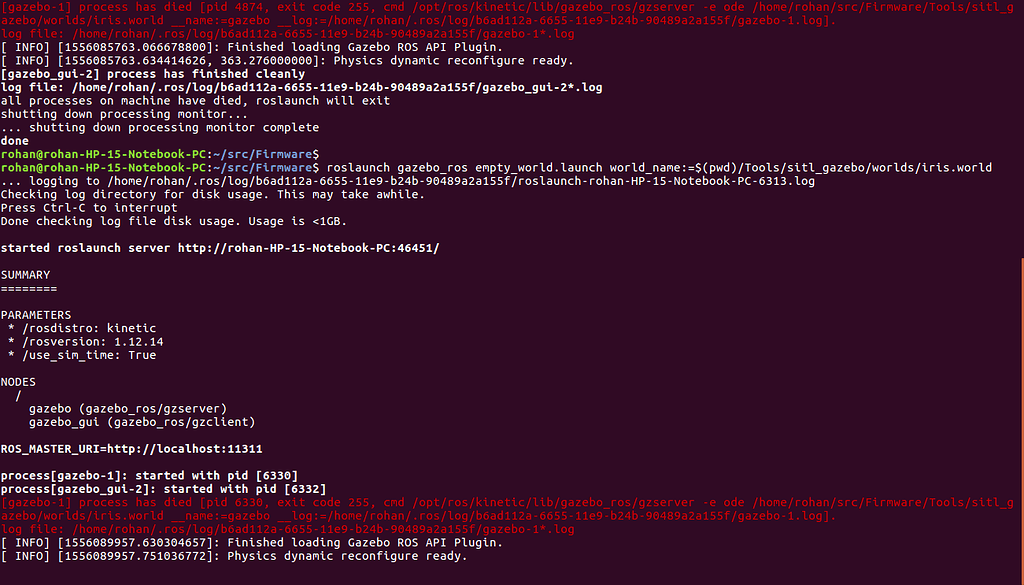
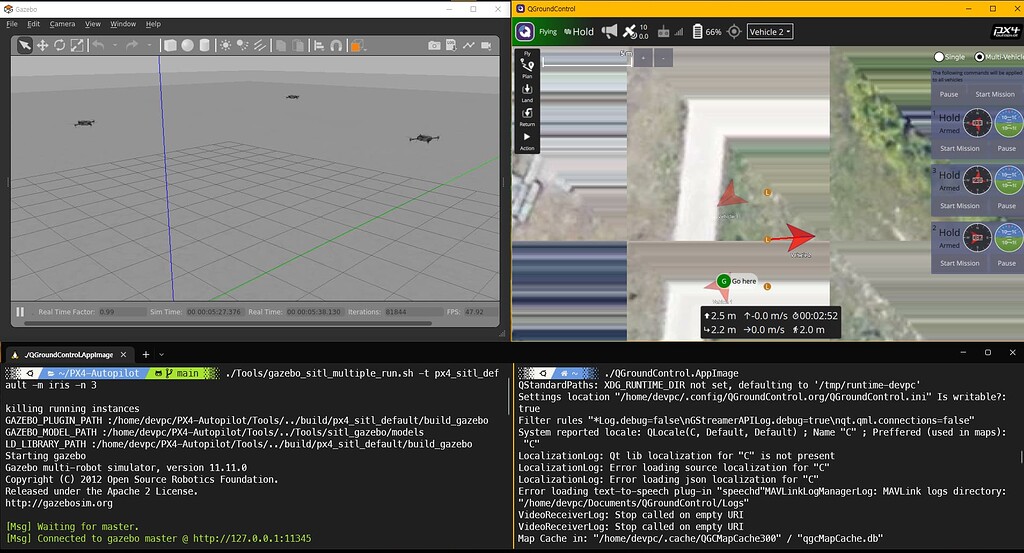
How to simulate multi vehicle PX4 on SITL within Gazebo with QGC
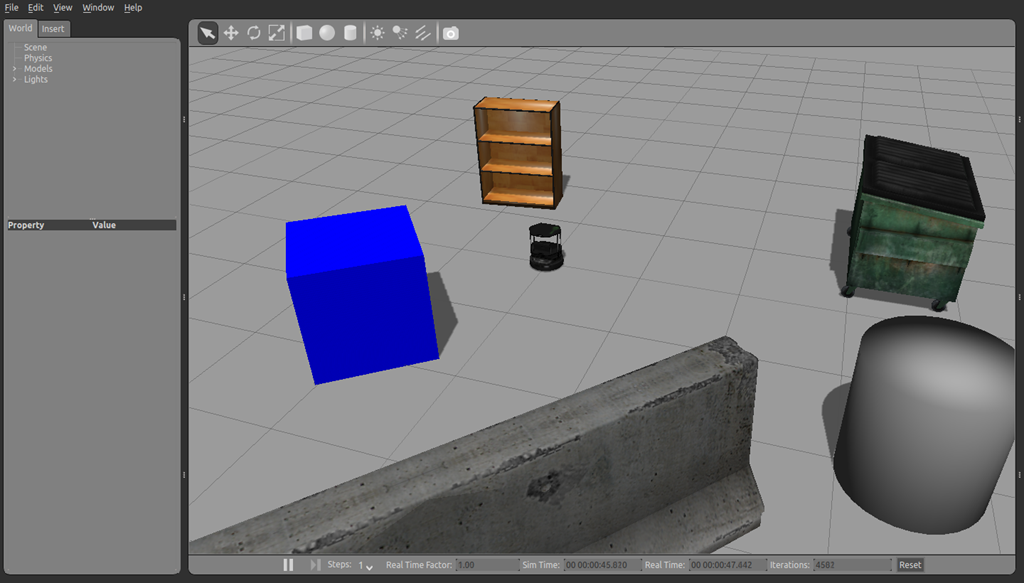
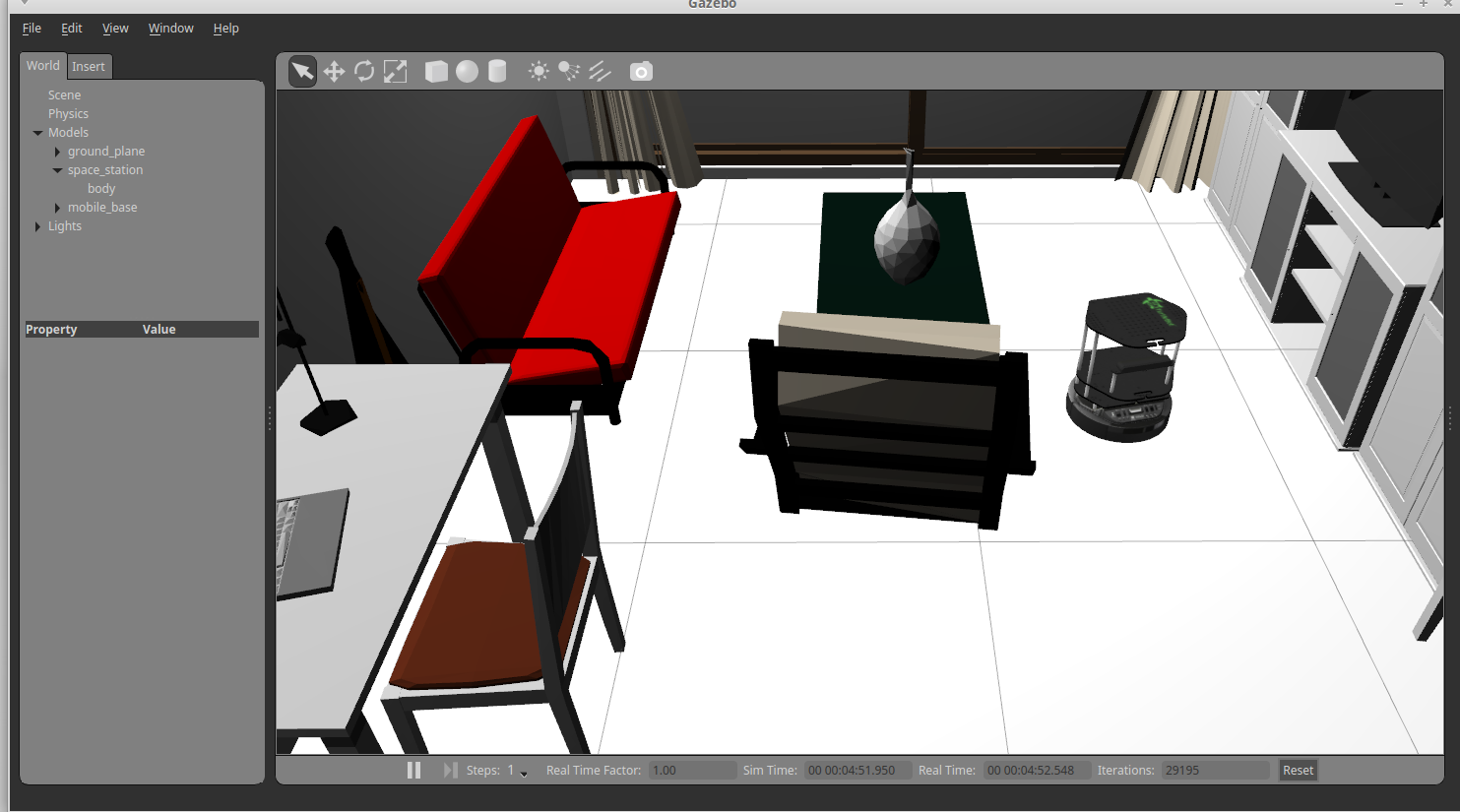
Using Sweethome3D models in the Gazebo Simulator Part 1 Create
Description
Product code: Gazebo linux top
Gazebo running on Windows and Linux top, Using SITL with Gazebo for Linux. Gazebo is an open source 3D top, Install Gazebo for ROS 2 in under a minute Ubuntu top, Gazebo Media top, Co Simulink Gazebo top, How to Move a Gazebo Model from Terminal VarHowto top, install gazebo simulator on linux machine top, Gazebo Simulation PX4 Developer Guide top, Gazebo robot simulator in an open world Linux Addicts top, Arch Linux PX4 Developer Guide top, Install gazebo on Linux Snap Store top, Community meeting Distributing Gazebo as a snap Jul 2022 top, top, Getting Ready for ROS Part 8 Simulating with Gazebo Articulated top, How to Launch Gazebo in Ubuntu Automatic Addison top, How ROS and Gazebo can be used to simulate a robotic arm top, All about Gazebo 9 with ROS. Let s see how to install Gazebo 9 top, Robots and Linux a Match Made in Space top, How to Simulate a Robot Using Gazebo and ROS 2 Automatic Addison top, Getting Ready for ROS Part 8 Simulating with Gazebo Articulated top, Write Launch and URDF XACRO Models Files and Load them in Gazebo top, top, Simulating uav using gazebo and ros ArduCopter ArduPilot Discourse top, ROS Gazebo MATLAB MLRO top, How to simulate multi vehicle PX4 on SITL within Gazebo with QGC top, Using Sweethome3D models in the Gazebo Simulator Part 1 Create top, ROS development on Linux Windows and macOS Ubuntu top, Simulating Robots with Gazebo and ROS Getting Ready to Build Robots with ROS 8 top, ROS Gazebo black screen Issue 3368 microsoft WSL GitHub top, Infrastructure to connect Gazebo via ROS with Matlab on Windows top, Ignition Gazebo Development on Windows WSL will soon support top, Quadruped slide away in gazebo with ros2 control General Support top, Get Started with Gazebo and Simulated TurtleBot MATLAB Simulink top, Use Niryo robot through simulation Ned ROS Documentation v4.0.0 top, Point to point navigation Gazebo left and RViz right . Green top.
Gazebo running on Windows and Linux top, Using SITL with Gazebo for Linux. Gazebo is an open source 3D top, Install Gazebo for ROS 2 in under a minute Ubuntu top, Gazebo Media top, Co Simulink Gazebo top, How to Move a Gazebo Model from Terminal VarHowto top, install gazebo simulator on linux machine top, Gazebo Simulation PX4 Developer Guide top, Gazebo robot simulator in an open world Linux Addicts top, Arch Linux PX4 Developer Guide top, Install gazebo on Linux Snap Store top, Community meeting Distributing Gazebo as a snap Jul 2022 top, top, Getting Ready for ROS Part 8 Simulating with Gazebo Articulated top, How to Launch Gazebo in Ubuntu Automatic Addison top, How ROS and Gazebo can be used to simulate a robotic arm top, All about Gazebo 9 with ROS. Let s see how to install Gazebo 9 top, Robots and Linux a Match Made in Space top, How to Simulate a Robot Using Gazebo and ROS 2 Automatic Addison top, Getting Ready for ROS Part 8 Simulating with Gazebo Articulated top, Write Launch and URDF XACRO Models Files and Load them in Gazebo top, top, Simulating uav using gazebo and ros ArduCopter ArduPilot Discourse top, ROS Gazebo MATLAB MLRO top, How to simulate multi vehicle PX4 on SITL within Gazebo with QGC top, Using Sweethome3D models in the Gazebo Simulator Part 1 Create top, ROS development on Linux Windows and macOS Ubuntu top, Simulating Robots with Gazebo and ROS Getting Ready to Build Robots with ROS 8 top, ROS Gazebo black screen Issue 3368 microsoft WSL GitHub top, Infrastructure to connect Gazebo via ROS with Matlab on Windows top, Ignition Gazebo Development on Windows WSL will soon support top, Quadruped slide away in gazebo with ros2 control General Support top, Get Started with Gazebo and Simulated TurtleBot MATLAB Simulink top, Use Niryo robot through simulation Ned ROS Documentation v4.0.0 top, Point to point navigation Gazebo left and RViz right . Green top.