 View larger
View larger



Learning from demonstration top
Learning from demonstration top, Robot Learning from Demonstration Kinesthetic Teaching vs top
$102.00
SAVE 50% OFF
$51.00
$0 today, followed by 3 monthly payments of $17.00, interest free. Read More
Learning from demonstration top
Robot Learning from Demonstration Kinesthetic Teaching vs
HES SO LD4Robots Learning from Demonstration for Collaborative
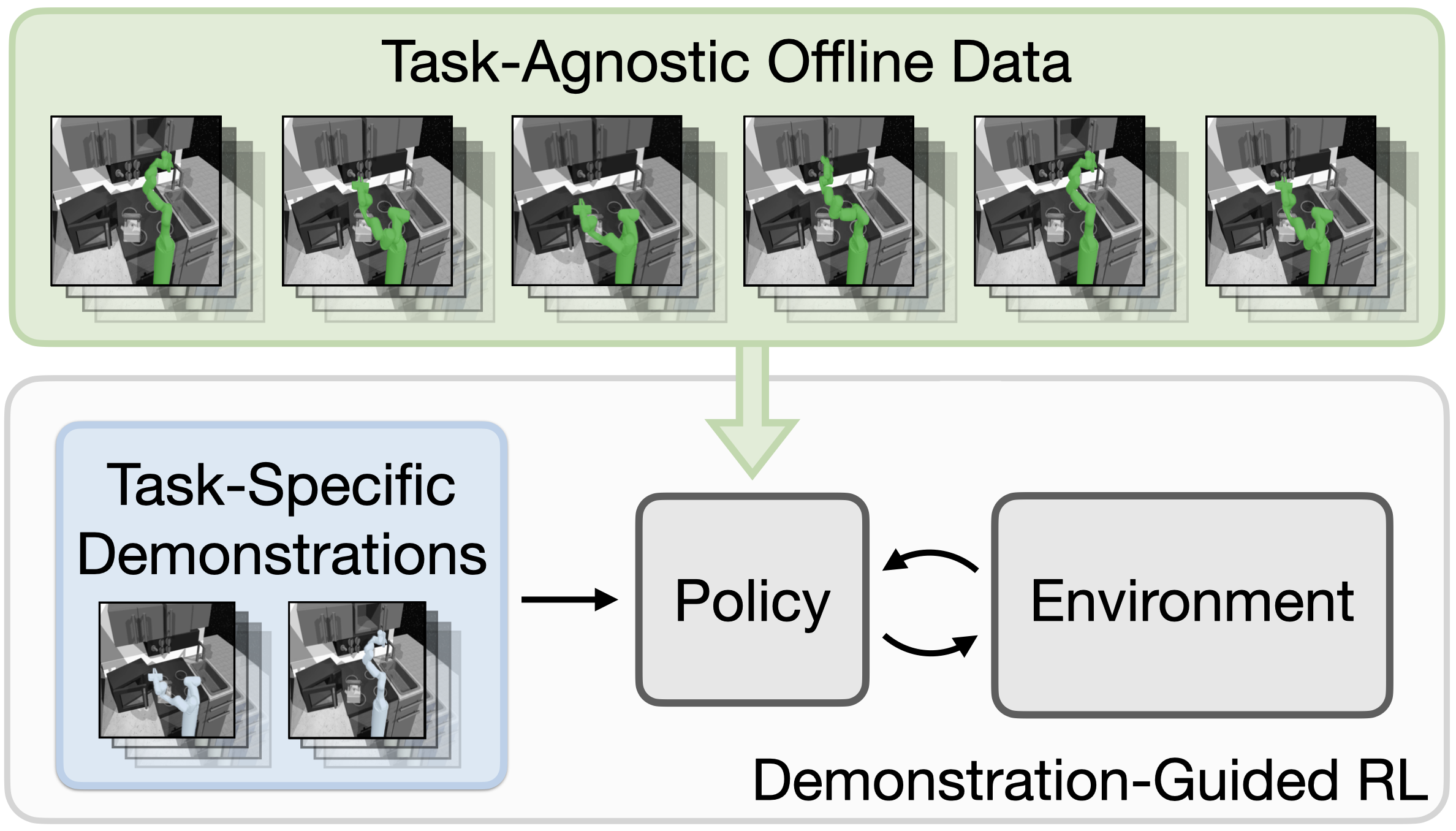
Demonstration Guided Reinforcement Learning with Learned Skills
Robotics Free Full Text Robot Learning from Demonstration in
Benchmark for Skill Learning from Demonstration
Learning from Demonstration in the Wild Feryal Behbahani
Description
Product code: Learning from demonstration top
The proposed Gaussian Process based learning from demonstration top, 3 Learning by demonstration Download Scientific Diagram top, Our general Learning from Demonstration Architecture involving 4 top, PDF Robot Learning from Demonstration in Robotic Assembly A top, Robot motion control with Learning from Demonstration LfD top, Learning from Demonstration Programming by Demonstration top, Robotics Free Full Text Learning from Demonstrations in top, CLAMP Combined Learning from demonstration And Motion Planning top, Combining Learning from Demonstration with Learning by Exploration to Facilitate Contact Rich Tasks top, Sensors Free Full Text Vision Based Learning from top, PDF Recent Advances in Robot Learning from Demonstration top, Yunlei Shi Combining Learning from Demonstration with Learning by top, One Shot Imitation from Watching Videos The Berkeley Artificial top, Close up figure of Learning from Demonstration LfD with a human top, A Robot Learning from Demonstration Framework to Perform Force top, Concept Constrained Learning from Demonstration Carl Mueller top, A Robot Learning from Demonstration Platform Based on Optical top, Research Kalesha Bullard top, Robot learning from demonstration LfD enables robots top, PDF A framework for learning from demonstration generalization top, Robot Learning from Demonstration Kinesthetic Teaching vs top, HES SO LD4Robots Learning from Demonstration for Collaborative top, Demonstration Guided Reinforcement Learning with Learned Skills top, Robotics Free Full Text Robot Learning from Demonstration in top, Benchmark for Skill Learning from Demonstration top, Learning from Demonstration in the Wild Feryal Behbahani top, A technique to teach bimanual robots stir fry cooking top, Helping robots learn using demonstrations MIT CSAIL top, Robot learning from demonstrations Emulation learning in top, Combining Learning from Demonstration with Learning by Exploration top, Overview of the Experimental setup used for learning from top, Roboclette top, Frontiers Learning by Demonstration for Motion Planning of Upper top, Unifying learning from preferences and demonstration via a ranking top, Continual learning from demonstration of robotics skills top.
The proposed Gaussian Process based learning from demonstration top, 3 Learning by demonstration Download Scientific Diagram top, Our general Learning from Demonstration Architecture involving 4 top, PDF Robot Learning from Demonstration in Robotic Assembly A top, Robot motion control with Learning from Demonstration LfD top, Learning from Demonstration Programming by Demonstration top, Robotics Free Full Text Learning from Demonstrations in top, CLAMP Combined Learning from demonstration And Motion Planning top, Combining Learning from Demonstration with Learning by Exploration to Facilitate Contact Rich Tasks top, Sensors Free Full Text Vision Based Learning from top, PDF Recent Advances in Robot Learning from Demonstration top, Yunlei Shi Combining Learning from Demonstration with Learning by top, One Shot Imitation from Watching Videos The Berkeley Artificial top, Close up figure of Learning from Demonstration LfD with a human top, A Robot Learning from Demonstration Framework to Perform Force top, Concept Constrained Learning from Demonstration Carl Mueller top, A Robot Learning from Demonstration Platform Based on Optical top, Research Kalesha Bullard top, Robot learning from demonstration LfD enables robots top, PDF A framework for learning from demonstration generalization top, Robot Learning from Demonstration Kinesthetic Teaching vs top, HES SO LD4Robots Learning from Demonstration for Collaborative top, Demonstration Guided Reinforcement Learning with Learned Skills top, Robotics Free Full Text Robot Learning from Demonstration in top, Benchmark for Skill Learning from Demonstration top, Learning from Demonstration in the Wild Feryal Behbahani top, A technique to teach bimanual robots stir fry cooking top, Helping robots learn using demonstrations MIT CSAIL top, Robot learning from demonstrations Emulation learning in top, Combining Learning from Demonstration with Learning by Exploration top, Overview of the Experimental setup used for learning from top, Roboclette top, Frontiers Learning by Demonstration for Motion Planning of Upper top, Unifying learning from preferences and demonstration via a ranking top, Continual learning from demonstration of robotics skills top.